BlendUR
Robot simulation & control
BlendUR
Robot simulation & control
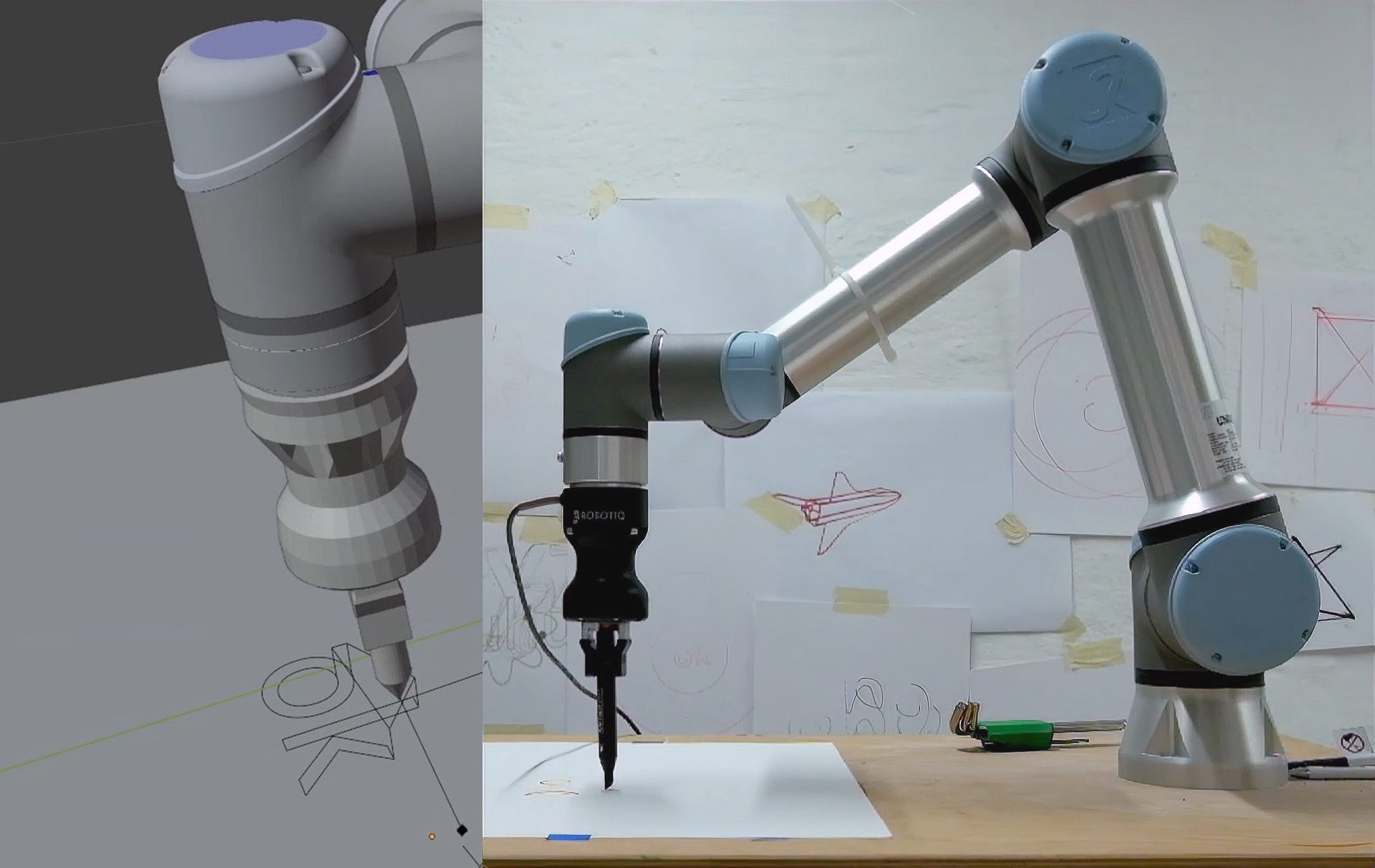
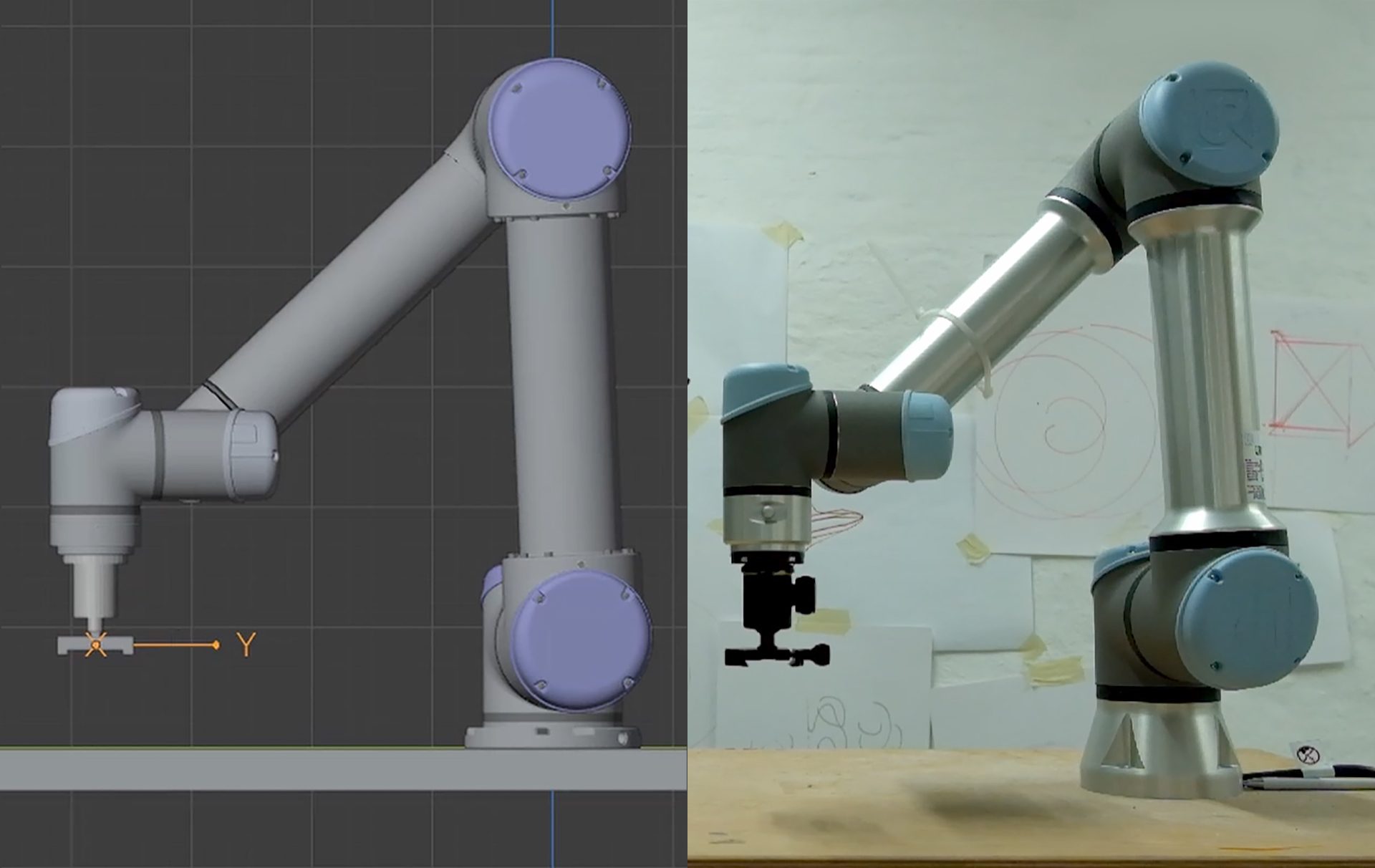
BlendUR is capable of solving and simulating the kinematics for Universal Robots UR3e, UR5e and UR10e. Furthermore it assists with tool handling, motion path creation and facilitates real time control of a connected robot. The integration with Blender allows using the powerful 3D capabilities to simulate a digital twin inside a work environment with lighting, other peripheral objects and effects. The combination of simulation and real time interaction with the robot can be used to easily realize complex robot motion.
Technical features
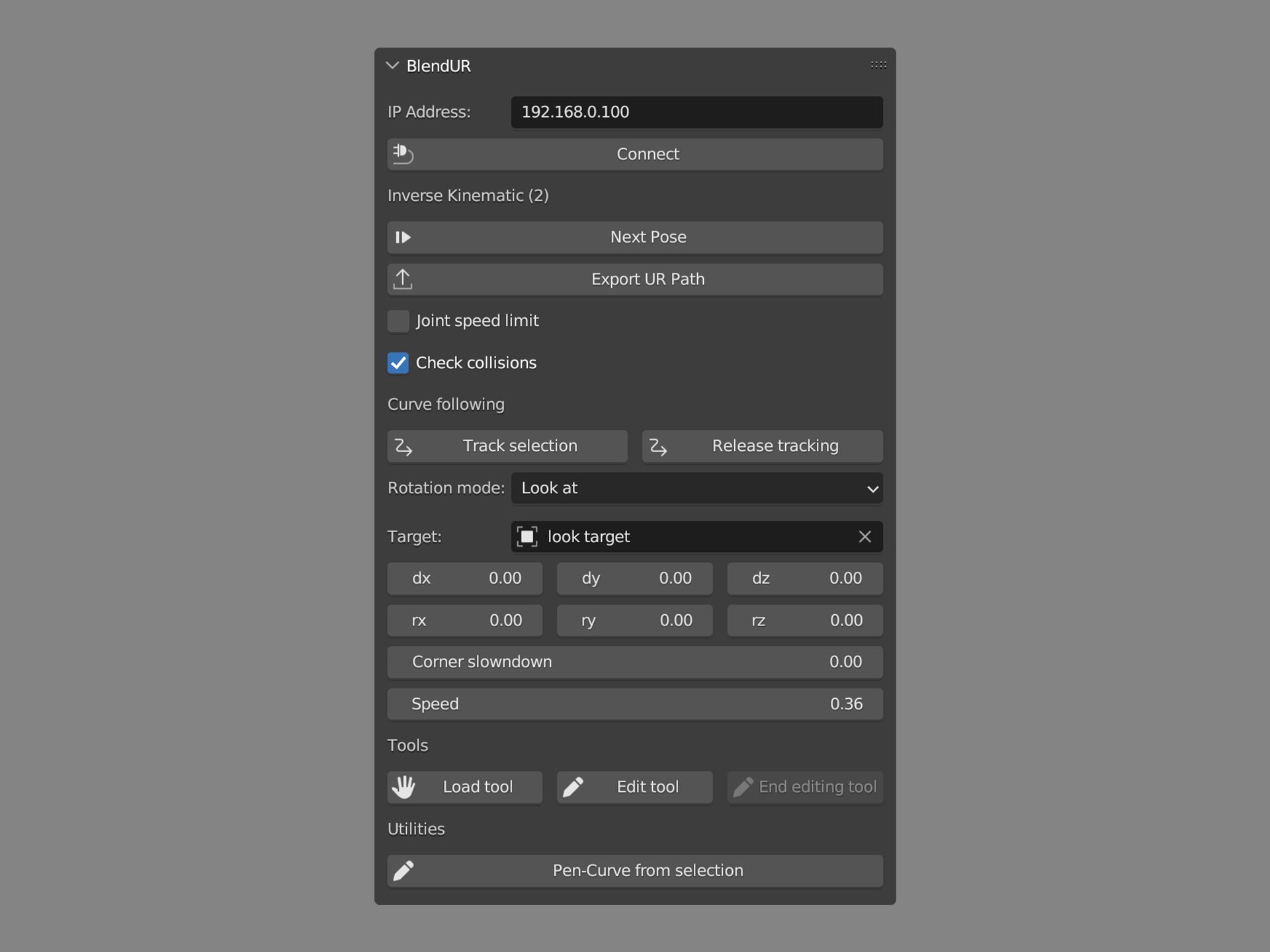
• Edit robot paths in Blender
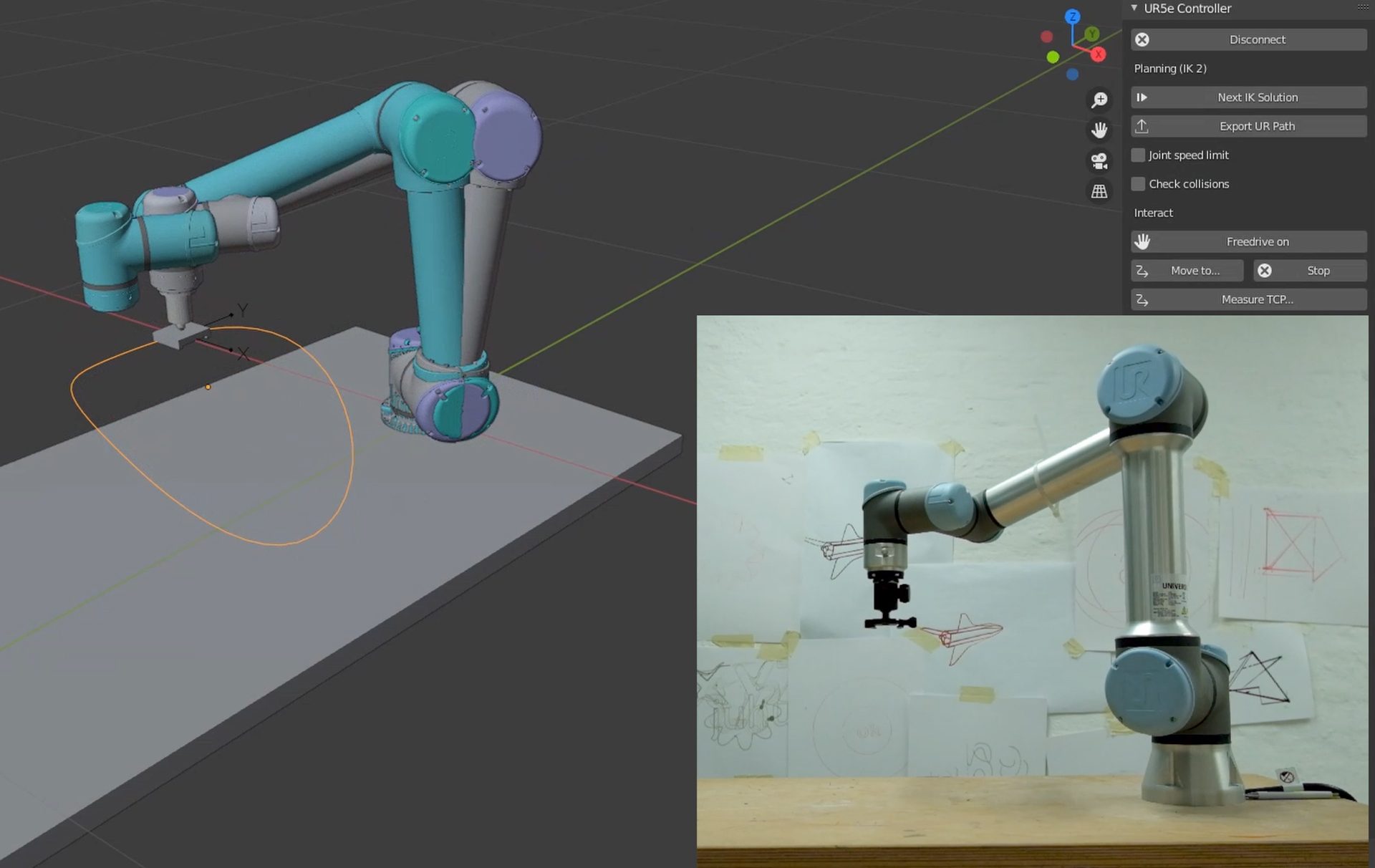
• Realtime robot control
• Preview of robot collision
• Adding and editing of custom tools
• Export robot paths to a Python script
• Available for Windows and Mac (Linux on request)
Licensing options
BlendUR-Licensing.pdf
BlendUR is a research project by KASUGA’s long term collaborator Hans Raber and available for permanent licensing or project based use. Please send an inquiry or get in touch for more information.

Published
June 2022
Related work